Ziele
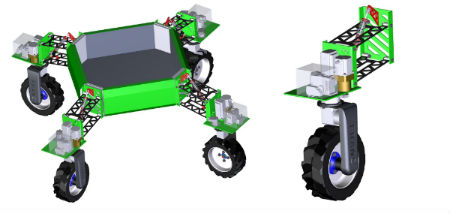
Modularer Feldroboter
Elektrischer Antrieb
Enger Wenderadius
Fernsteuerung mittels Smartphone
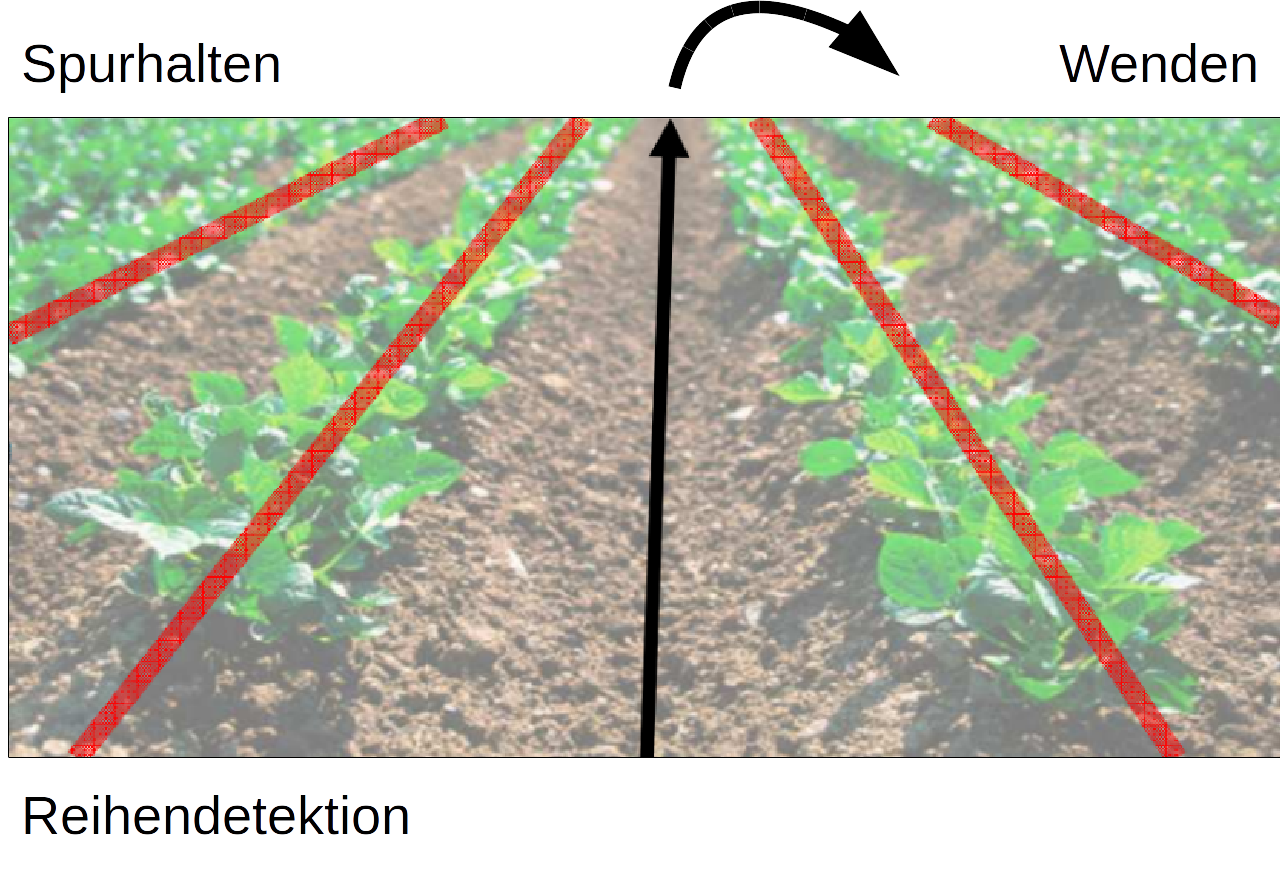
Automatisches Navigationssystem mit Hindernisreihendetektion
Pflanzenreihendetektion
Anbau von Fingerhackrädern
Während in der modernen Landwirtschaft zunehmend leistungsfähige komplexe Maschinen mit hochentwickelter Technologie eingesetzt werden, ist der Biolandbau vielfach von manuellen Arbeiten geprägt. Im Projekt FRANC wird ein autonomes Fahrzeug entwickelt und gebaut, welches speziell im Biolandbau eingesetzt werden kann. Das Fahrzeug wird mit der nötigen Antriebs- und Sensortechnik sowie Steuerungshardware und -software ausgestattet um selbständig durch Reihenkulturen fahren zu können. Das Fahrzeug wird vollständig elektrisch angetrieben. Durch lenkbare Vorder- und Hinterachsen werden enge Wenderadien ermöglichen. Ein modularer Aufbau des Fahrzeugs soll eine leichte Adaption an das Arbeitsumfeld ermöglichen.
Um zu gewährleisten, dass das Fahrzeug bei Kollisionsgefahr unmittelbar und verzögerungsfrei zum Stehen gebracht und in einen sicheren Betriebszustand versetzt werden kann, wird ein eigenes Schutzkonzept entwickelt. Im Hinblick auf die Sicherheitstechnik wird davon ausgegangen, dass das Fahrzeug vorerst nicht unbeaufsichtigt eingesetzt wird. Der Feldroboter soll mittels Fernsteuerung bedient werden können, die jederzeit einen Eingriff in die Fahrzeugsteuerung erlaubt.
Mit diesem Projekt wird die Schulausbildung an eine sehr bedeutende technologische Entwicklung in der Landtechnik herangeführt. Dabei soll vor allem das Interesse der Schüler an der Robotik geweckt werden. Der Einsatz moderner Technologien (Sensortechnik, Navigation, Antriebstechnik, Steuerungstechnik,etc) kann sehr anschaulich vermittelt werden. Das Projekt bietet weiter ein grosses Forschungspotenzial: Der Trend in der Entwicklung geht hin zur individuellen Erkennung und Behandlung einzelner Pflanzen. Damit sind Aufgabenstellungen verbunden, die weit über das Projektziel hinausreichen und es wird damit die Basis für eine zukünftige und langjährige Zusammenarbeit mit den Projektpartnern darstellen.
Modularer Feldroboter
Elektrischer Antrieb
Enger Wenderadius
Fernsteuerung mittels Smartphone
Automatisches Navigationssystem mit Hindernisreihendetektion
Pflanzenreihendetektion
Anbau von Fingerhackrädern
| Leistung: | 500W el./280W mech. pro Achse |
| Antriebsenergie: | Akkupack (2 Stk. LiMn 36V/18Ah) |
| Gewicht: | ca. 300 kg |
| Geschwindigkeit: | max. 10km/h |
| Abmaße (L x B): | ca. 1,8 x 1,8m |

Projektleiter
Dr. Johann Prankl
Wissenschaftliche Kooperationspartner
Beteiligte Schulen
Partner aus Wirtschaft und Gesellschaft
